
Automotive use cases
Intelligent Traffic Surveillance
Unicam a state-of-theart and field-proven platform for creation of multifunctional and scalable intelligent vision-based and signal processing solutions. The platform has been used by CAMEA in two key areas: intelligent transportation systems and industrial inspection systems. Currently, on the sites, Unicam systems are updated with CAMEA’s smart cameras with the ability of running license plate video detection algorithms. Detection results are then sent to a server and processed in the meaning of the matching corresponding detection and calculating average speed. At any time, we have to prove the source of the data and time of the capture. We also have to ensure that the data cannot be counterfeited at any time. Thus, we aim at implementing data signing mechanisms with possible encryption directly in the smart camera. During the VALUE3S project, CAMEA is planning to investigate smart and mostly wireless sensors (cameras, radars, etc.) in terms of testing and verification of its reliability and security.
Car Teleoperation
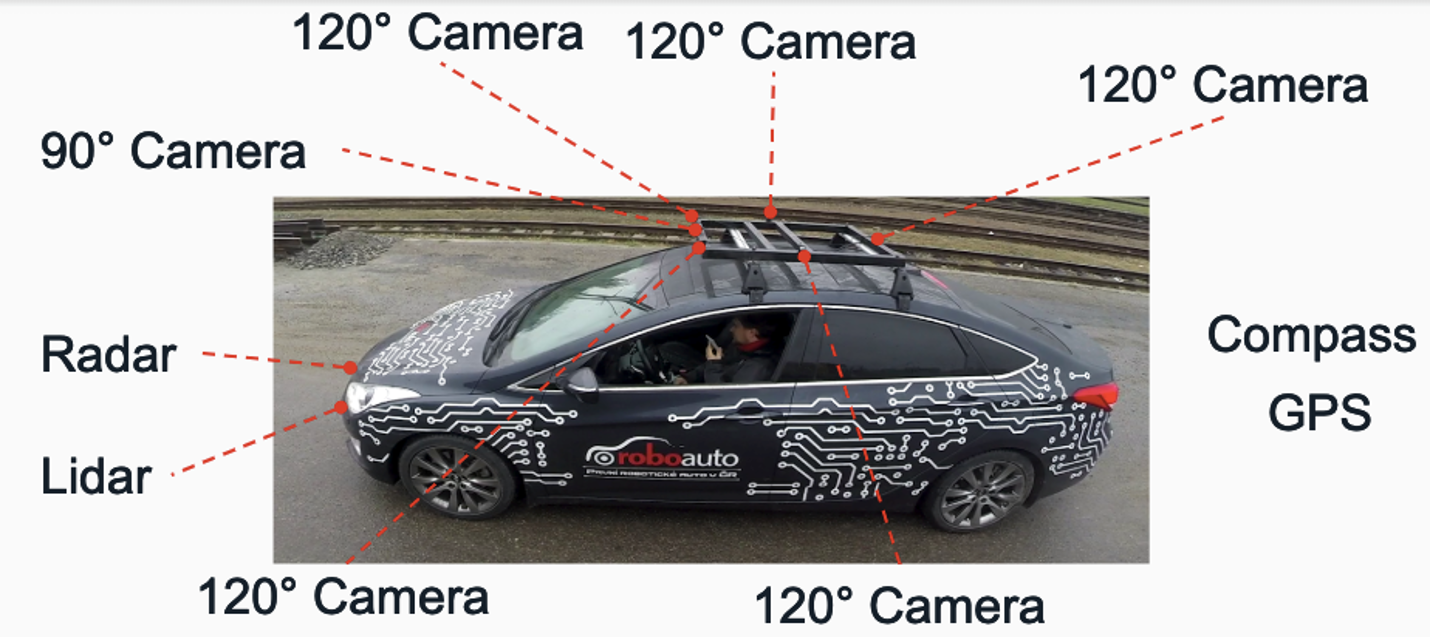
Roboauto initiative started in 2007 with a small model of a remote-controlled car, which was over the years improved and grew into the medium model. These models were mainly participating in country robotic car competitions with the goal to get from point A to point B in a decent time without a defect or accident. The current model used by Roboauto is a real car – a Hyundai i40 – with drive by wire support. The car has six cameras installed on the roof. In the front part, radar and lidar are installed to monitor surrounding traffic-related objects and possible obstacles on the road. The car also has a built-in compass and GPS location tracker. The computer located in the car trunk is processing the data from the sensors. It is connected with cameras through the GMSL bus, the rest of the sensors send data via CAN bus. The driving is currently done by means of remote control from the lab, which controls the car through the steering wheel and pedals. The module is connected to the LTE network, and the commands are then delivered to the car driving module. Roboauto must ensure the car is safe also in these cases: one of the cameras, radar or lidar, GPS or compass malfunctions, data mismatch between sensors (e.g. caused by delay), a delay in sensor data, a delay in remote control towards the car, decreased throughput of LTE network, line detection fails, and object detection malfunctions. In the VALU3S project, the focus is on safety in presence of decreased throughput of LTE network, and latency of the LTE network while performing teleoperation of the car.
Radar system for ADAS
NXP provides radar ICs for ADAS functionality to the open market. With the development of new generation of radar ICs, enabling more autonomous driving functionalities, also the complexity of V&V rises. To tackle the increase of V&V complexity, higher levels of automation in the V&V are needed that allow higher coverage with more measurements while increasing testing speeds. Hence, NXP needs to develop system that allows quicker validation while increasing test coverage. Such a system is a radar system test bench which is placed in lab, and consists of at least a radar module in an anechoic chamber with various movable target simulators as well as a computer control for running the tests. Based on the system use cases tests will be run automatically.